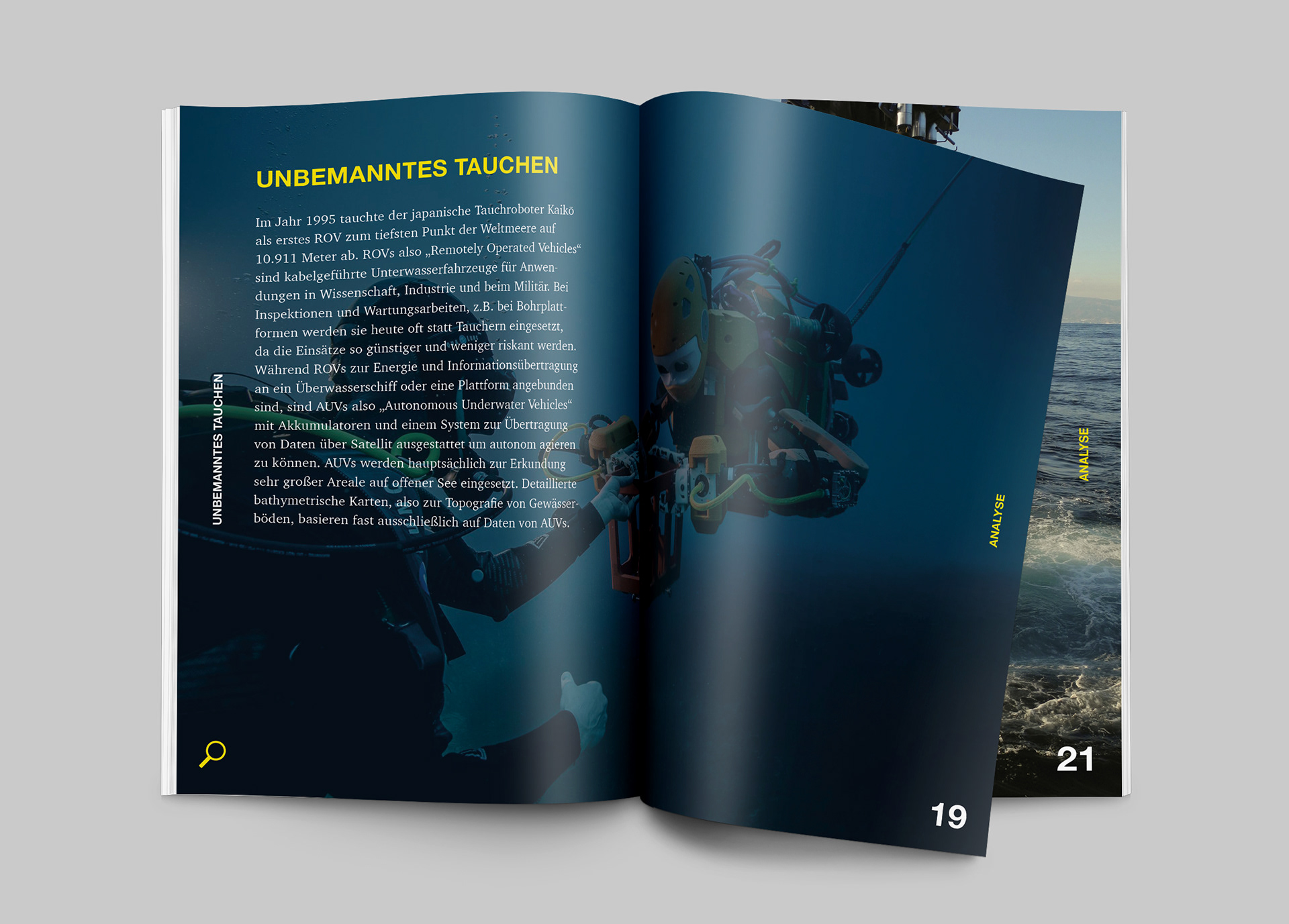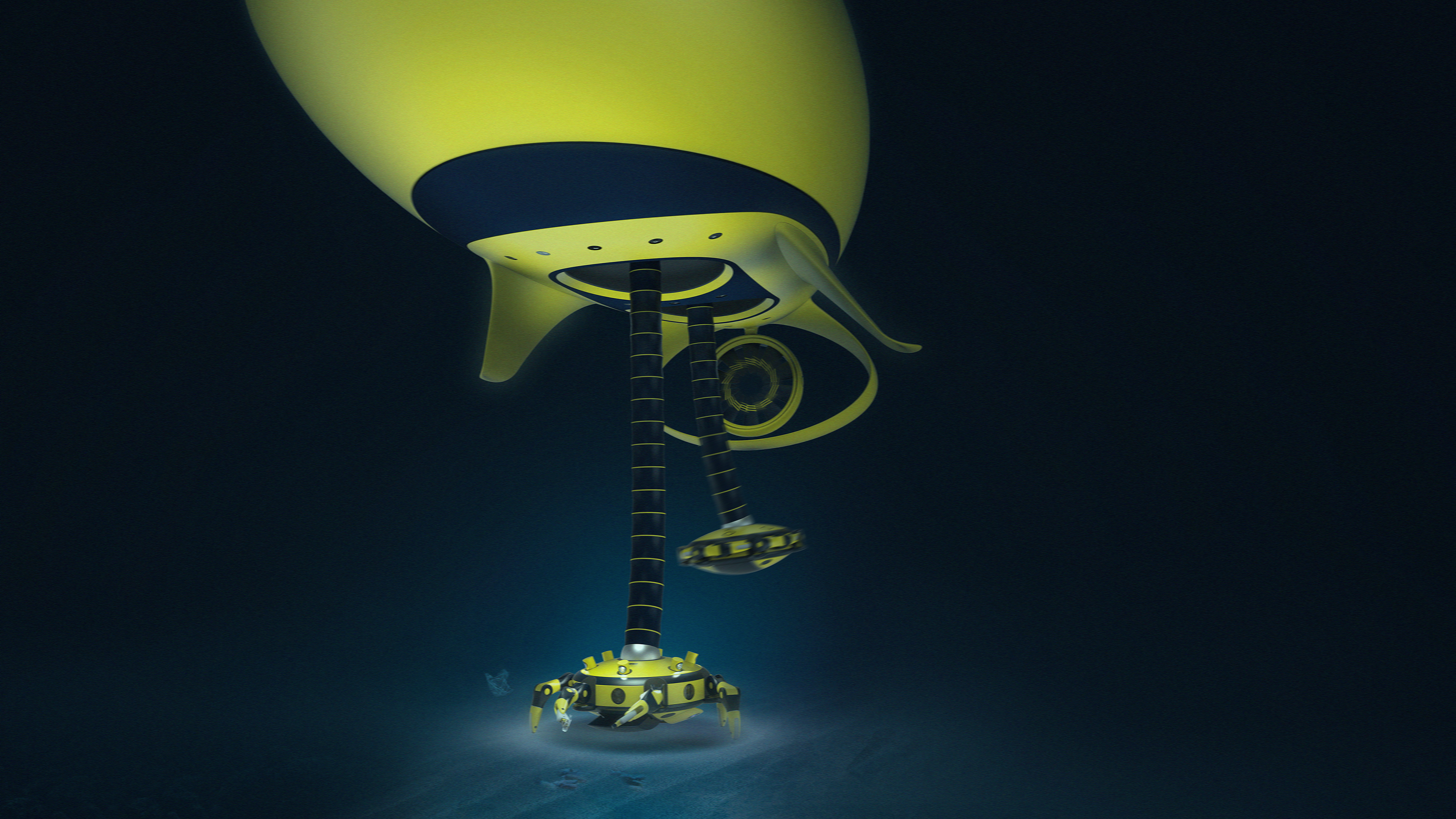
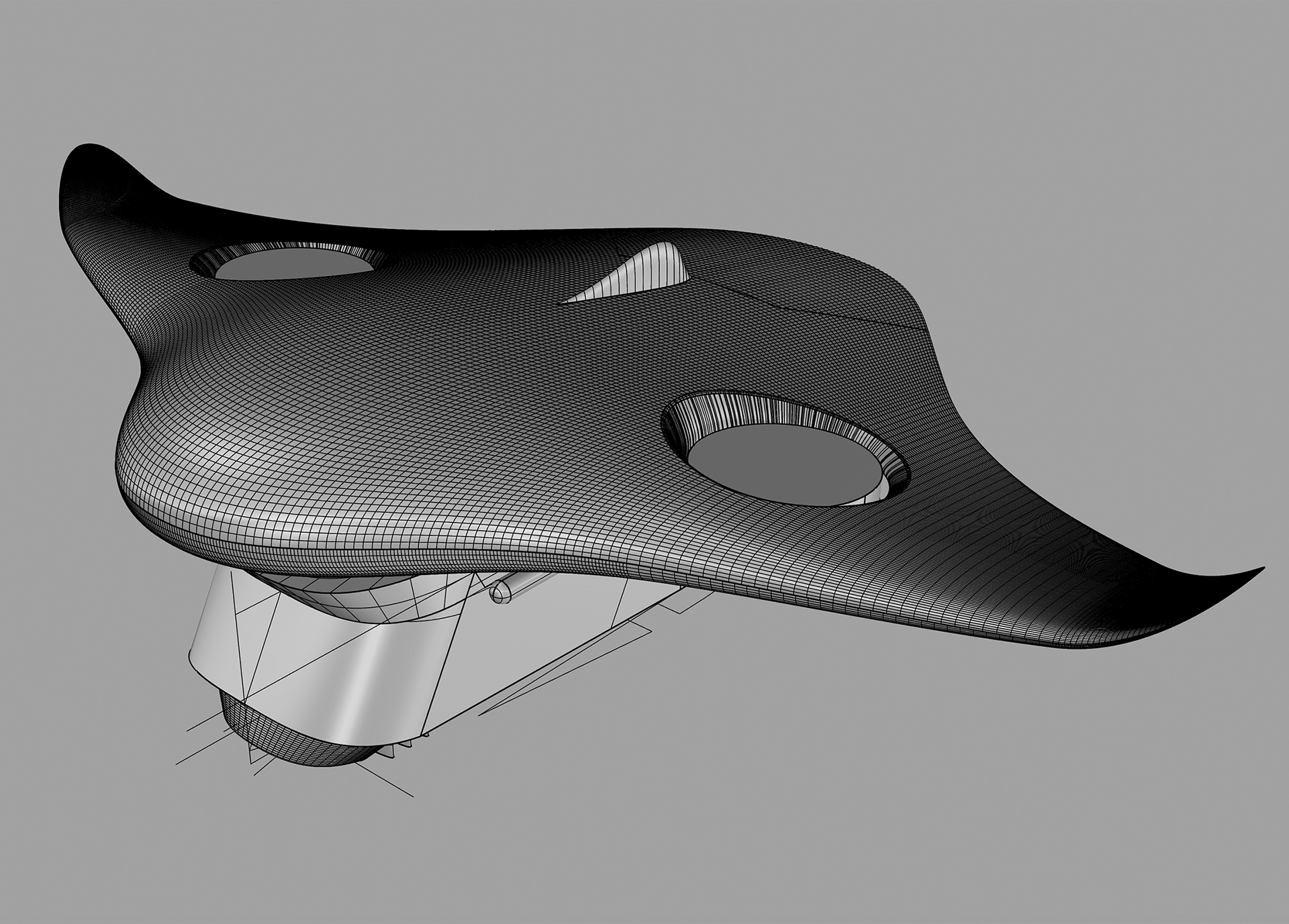
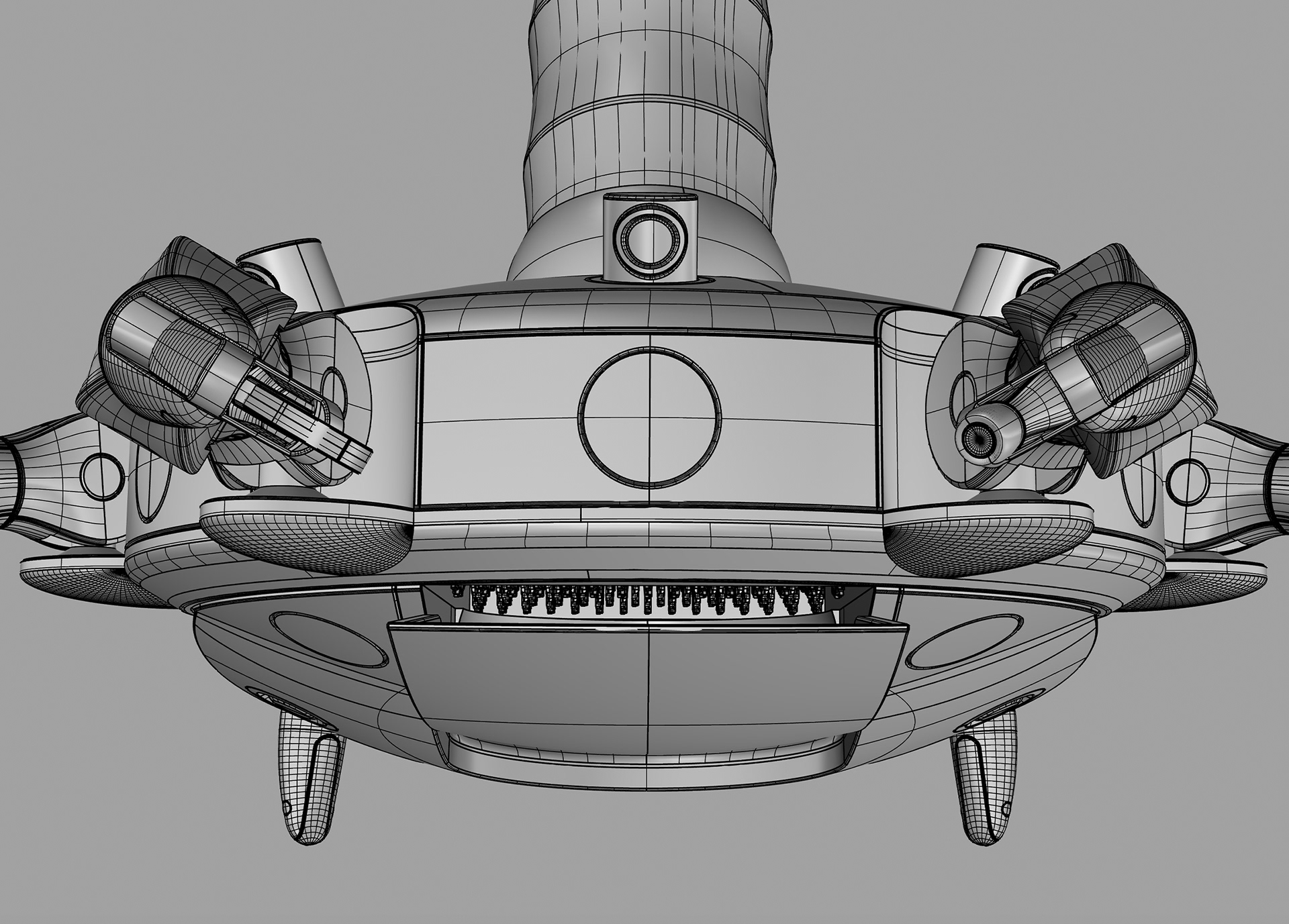
IONA ist ein ferngesteuertes, unbemanntes Tauchboot (ROV) mit Kabelanbindung an ein Forschungs- oder Fabrikschiff. Es besteht aus einem Tank mit 200 Tonnen Fassungsvermögen, einem Trägermodul mit Heckantrieb und zwei krebsartigen Plastiksammlern. In durchschnittlich vier Kilometer Tiefe soll das System Plastikmüll vom Meeresgrund sammeln und bergen.



Motivation
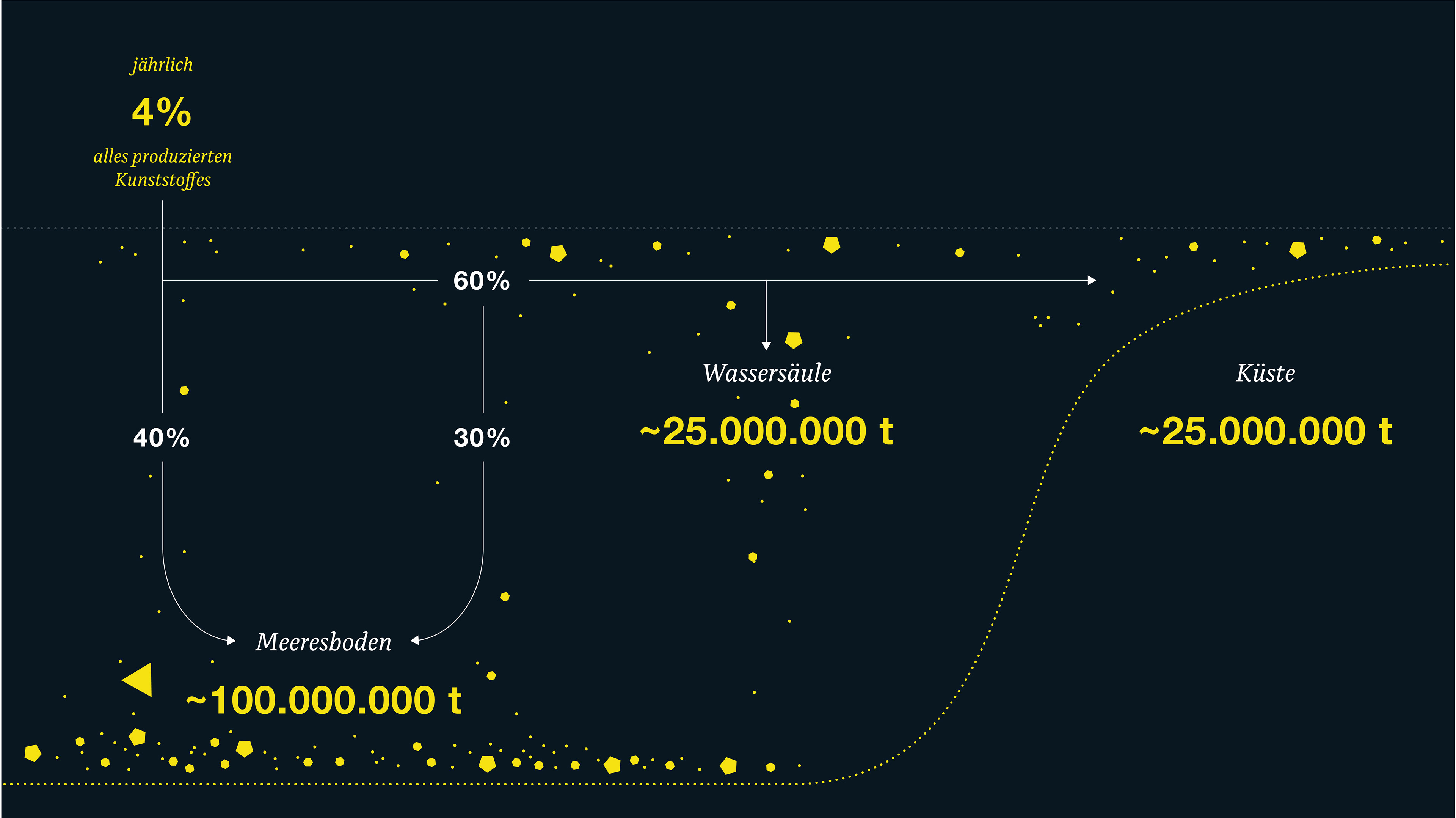
Seit 1950 gelangen jährlich etwa 4% alles produzierten Kunststoffes in unsere Meere und sinken zu 70% auf den Meeresgrund ab. Zusammengerechnet haben sich dort fast 100.000.000 Tonnen Plastikmüll angesammelt, was etwa zwei Verschlüssen von Plastikflaschen pro Quadratmeter entspricht. Plastikteile werden von Meeresbewohnern mit Nahrung verwechselt, verstopfen ihre Verdauung und vergiften sie. Mit etwa 90.000.000 Tonnen gefangenem Fisch jährlich vergiften wir unsere eigene Nahrung.
Analyse
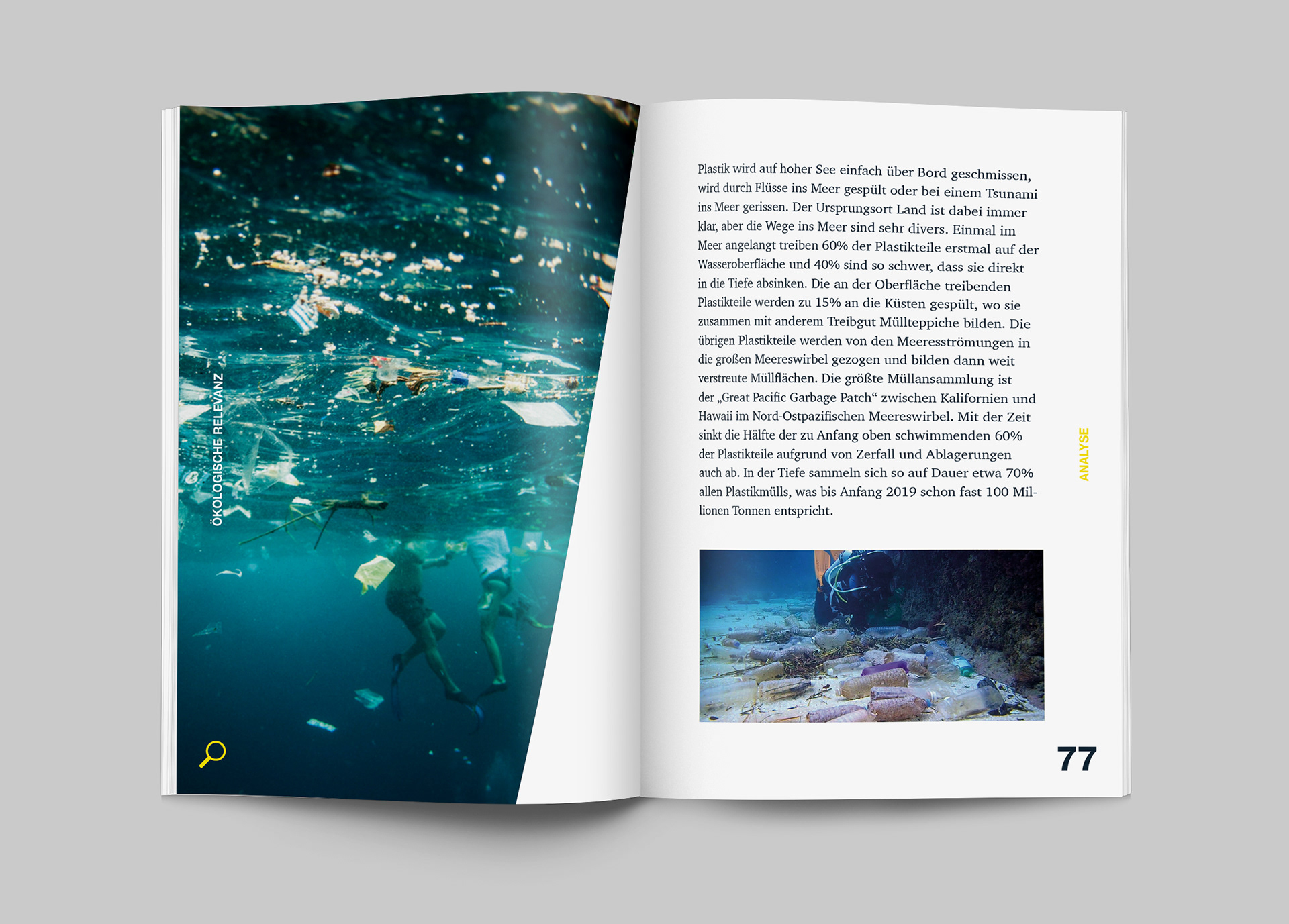
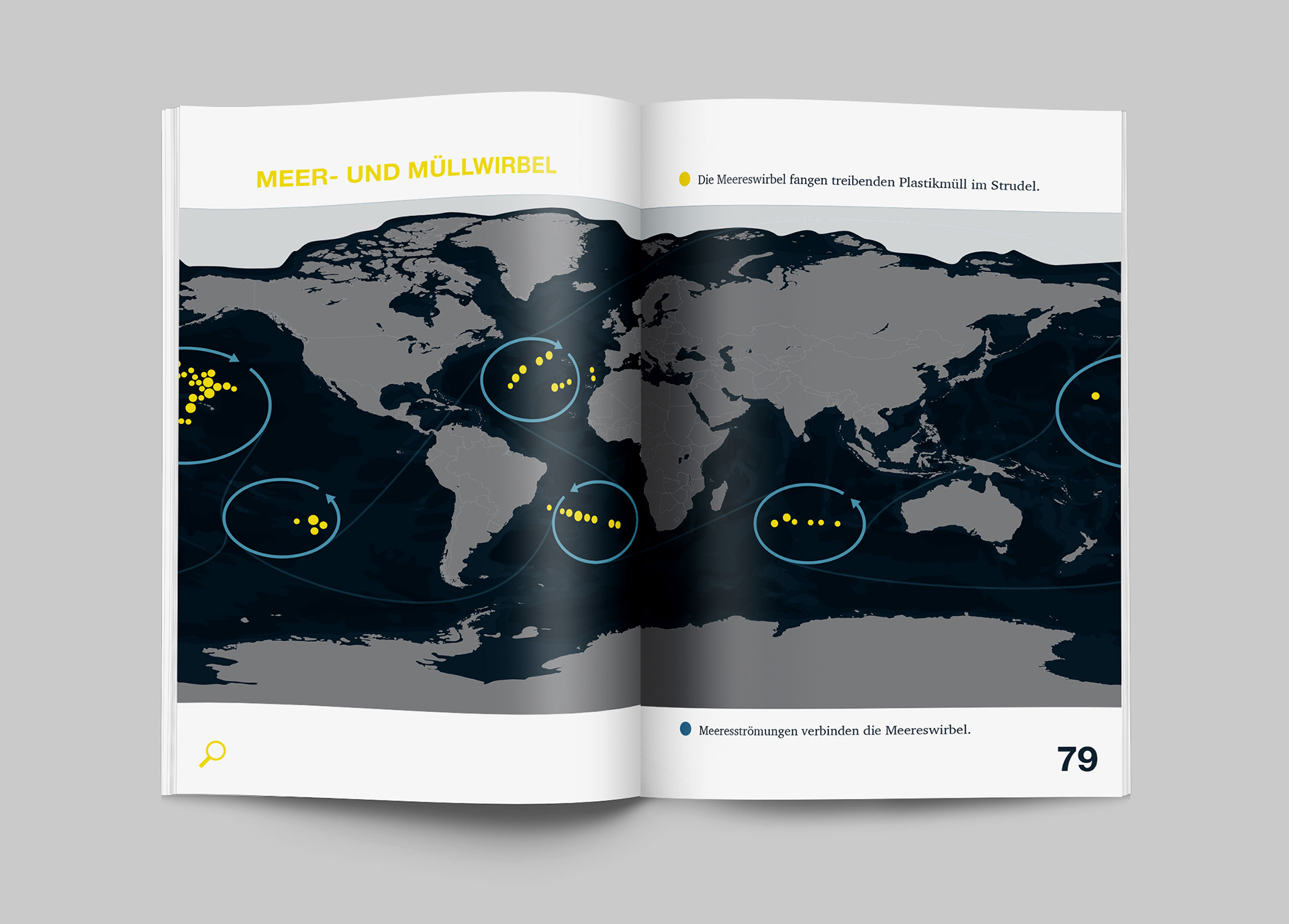
Plastik wird auf hoher See einfach über Bord geschmissen, wird durch Flüsse ins Meer gespült oder bei einem Tsunami ins Meer gerissen. Der Ursprungsort Land ist dabei immer klar, aber die Wege ins Meer sind sehr divers. Einmal im Meer angelangt treiben 60% der Plastikteile erstmal auf der Wasseroberfläche und 40% sind so schwer, dass sie direkt in die Tiefe absinken. Die an der Oberfläche treibenden Plastikteile werden zu 15% an die Küsten gespült, wo sie zusammen mit anderem Treibgut die Strände verschmutzen. Die übrigen Plastikteile werden von den Meeresströmungen in die großen Meereswirbel gezogen und bilden dann weit verstreute Müllteppiche. Die größte Müllansammlung ist der »Great Pacific Garbage Patch« zwischen Kalifornien und Hawaii im Nord-Ostpazifischen Meereswirbel. Mit der Zeit sinkt die Hälfte der zu Anfang oben schwimmenden 60% der Plastikteile aufgrund von Zerfall und Ablagerungen auch ab. In der Tiefe sammeln sich so auf Dauer etwa 70% allen Plastikmülls, was bis Anfang 2019 schon fast 100 Millionen Tonnen entspricht. Ein System zur Reinigung des Meeresgrundes wäre letztlich für uns alle tätig, um dort aufzuräumen wo Menschen die Verschmutzung leicht ignorieren können, bis das Plastik im Fisch oder am Strand zu ihnen zurückkommt.




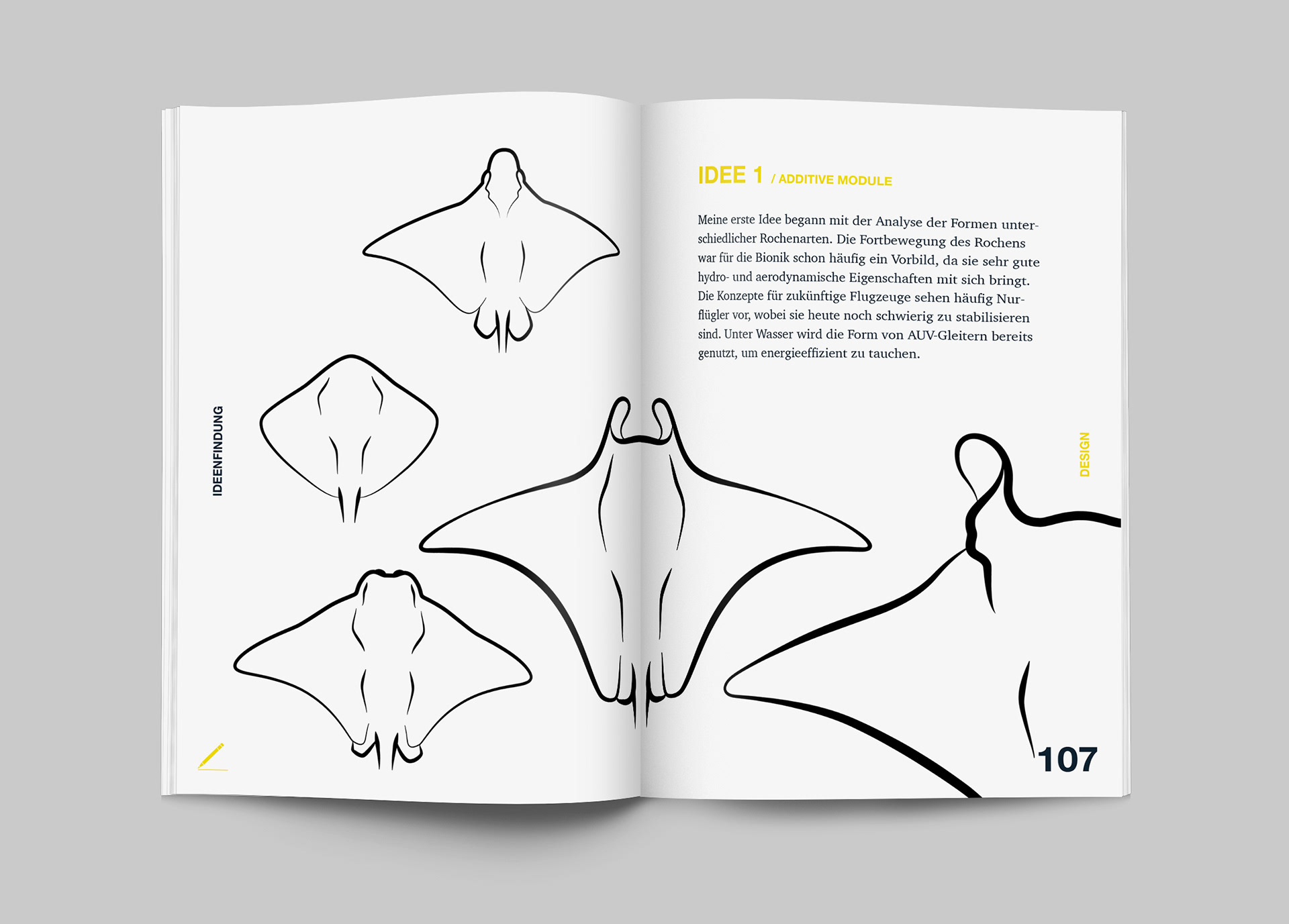
Design
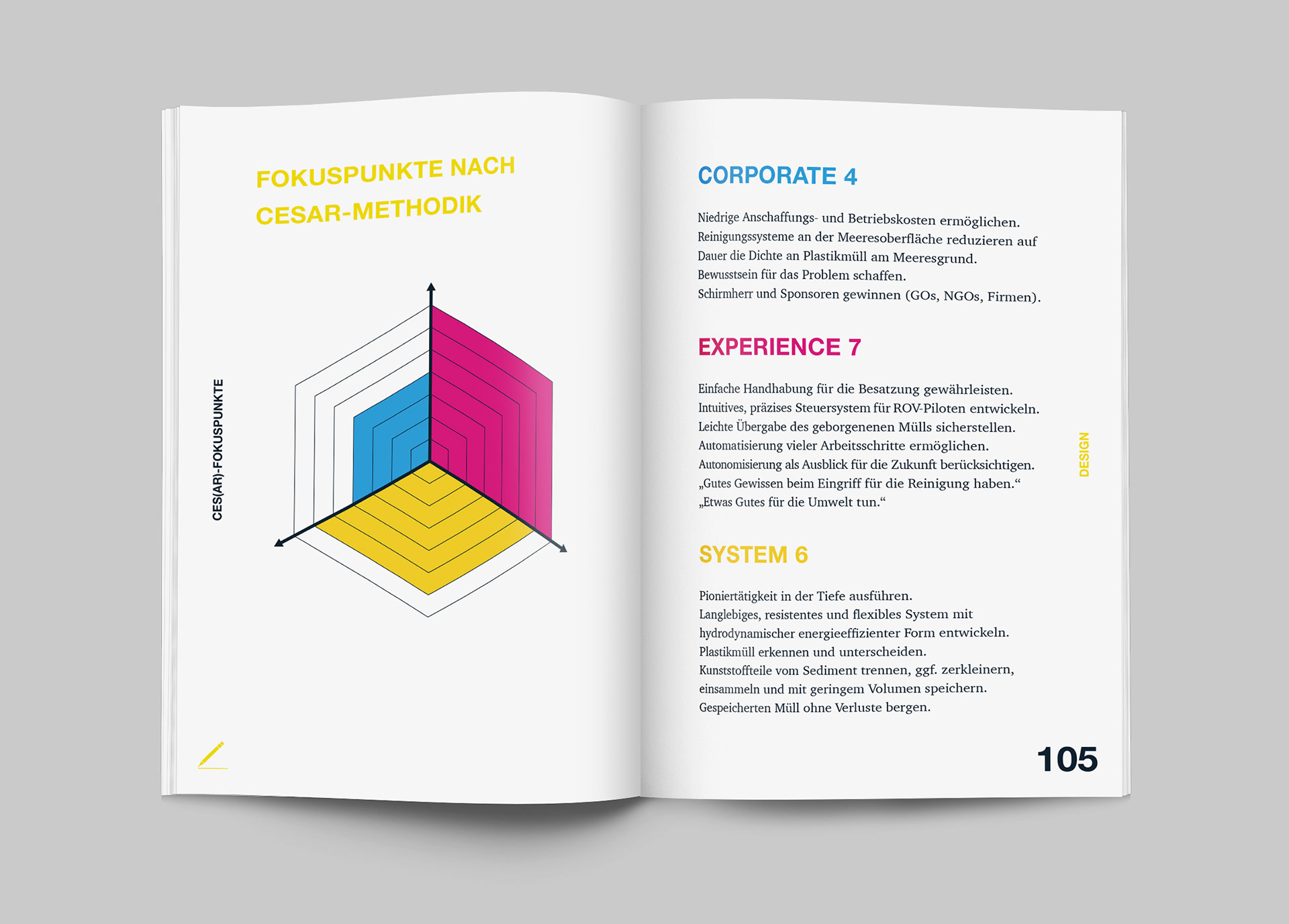
Nutzerzentriert betrachtet, muss die User Experience für die Crew aus „Meeresreinigern“ gewährleistet sein. Für die Piloten eines ferngesteuerten Tauchboots, die Wartungstechniker oder Meeres-Müllwerker müssen auch die Schnittstellen zwischen Mensch und Technik an Bord betrachtet und optimiert werden. Aufgrund des großen Fassungsvermögens und der damit verbundenen Dauer einer Mission bis der Tank voll ist, ist die Konfiguration als ROV zu bevorzugen. Die Möglichkeit über ein Kabel Strom und Daten austauschen zu können, verlängert die Einsatzmöglichkeit und minimiert das Risiko eines Systemverlusts in der Tiefe der Meere. Ein Trägermodul mit Antrieb und Sensoren ist mit eingesetzten Akkumulatoren als AUV einsetzbar und erkundet den Meeresboden für die nächste Mission. Ein Tank mit Kabelanbindung an das Schiff wird auf ein zweites Trägermodul montiert und zusammen fungieren sie als ROV. Dieser Aufbau spart Kosten in der Produktion, da das ROV-Reinigungssystem und der AUV-Erkunder aus den gleichen Bauteilen bestehen. Wenn Tank und Trägermodul miteinander verbunden sind, werden keine Akkumulatoren mehr benötigt, da die Stromversorgung über das Kabel am Tank erfolgt. An die Stelle des Akkumulatoren-Moduls wird ein Saugermodul mit Raum zur Unterbringung der beiden Plastiksammler eingebaut. Das System besteht also aus einem Tank mit Versorgungs- und Datenkabel, einem Trägermodul mit Antrieb und Sensoren, einem Akkumulatoren-Modul und einem Saugermodul mit zwei Plastiksammlern. Diese modular kombinierten Systemkomponenten sind die Grundlage meines Reinigungssystems „IONA“.